ROS란?
ROS는 "Robot Operating System"의 약자로, 로봇 소프트웨어 개발을 위한 유연한 프레임워크이다. ROS는 실제 운영 체제(OS)가 아니라 로봇 프로그래밍을 위한 미들웨어, 즉 통신 인터페이스, 소프트웨어 라이브러리, 도구, 규약, 그리고 기능을 제공하는 집합체다.
ROS는 여러 버전이 존재하므로 Ubuntu 버전에 따라 알맞은 환경을 구축해야 한다. Ubuntu 20.04에는 ROS Noetic 버전이 호환되므로 Noetic을 설치해서 사용한다.
noetic/Installation/Ubuntu - ROS Wiki
If you rely on these packages, please support OSRF. These packages are built and hosted on infrastructure maintained and paid for by the Open Source Robotics Foundation, a 501(c)(3) non-profit organization. If OSRF were to receive one penny for each downlo
wiki.ros.org
사실 ROS Wiki에 제공되는 내용을 토대로 간단하게 설치할 수 있지만, 예외 상황으로 인해 ROS가 꼬이면 지우고 다시 환경세팅하기 귀찮아 지기 때문에.. 아래 과정을 그대로 따라오면 문제없이 설치할 수 있을 것이다!
1. Setup your sources.list
packages.ros.org의 소프트웨어를 허용하도록 컴퓨터를 설정
※ 주의
아래 코드를 실수로 2번 이상 입력하게 되면 sudo apt update를 할때마다 key warning 문구를 지속적으로 보게된다. 따라서 딱 한번만 터미널에 입력하도록 하자
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2. Set up your keys
ROS 패키지 서명 키를 시스템의 신뢰할 수 있는 키 목록에 추가
sudo apt install curl # curl이 설치되어 있지 않다면 설치
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
3. Installation
sudo apt update를 통해 ROS 저장소에서 패키지를 포함하도록 패키지 목록을 업데이트 진행 및 desktop-full 버전으로 ros noetic 설치
sudo apt update
sudo apt install ros-noetic-desktop-full
4. Environment setup
셸이 시작될 때마다 이 스크립트를 자동으로 소싱하는 것이 편리하므로 ROS 환경 변수를 bashrc에 추가
Bash 사용 시
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
zsh 사용 시
echo "source /opt/ros/noetic/setup.zsh" >> ~/.zshrc
source ~/.zshrc
5. Dependencies for building packages
ROS 패키지 구축을 위해 이 도구와 기타 종속성을 설치
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
6. Initialize rosdep
rosdep을 사용하면 컴파일하려는 소스에 대한 시스템 종속성을 간단하고 쉽게 설치할 수 있으며, ROS에서 일부 핵심 구성 요소를 실행할 수 있다.
sudo apt install python3-rosdep
sudo rosdep init
rosdep update
7. roscore를 통한 ros 설치 확인
ros 설치가 문제없이 완료되었다면 터미널 창을 키고 roscore가 정상적으로 작동하는지 확인해보자
roscore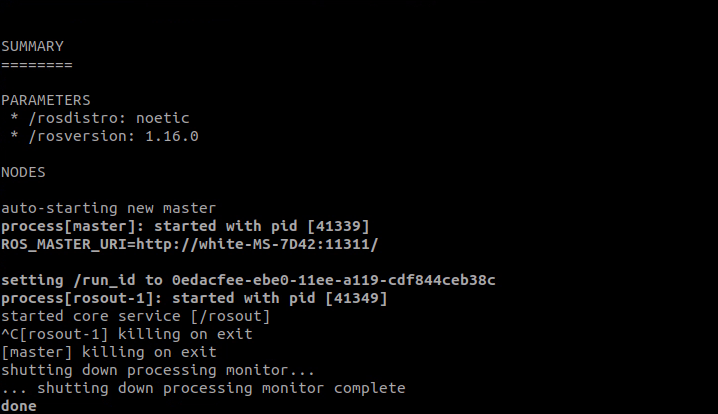
위 이미지처럼 화면이 나온다면 정상적으로 ros 설치가 완료된 것이다. 그럼 이제 ros를 활용해보자
'ROS' 카테고리의 다른 글
| [Ubuntu 20.04] "ros-latest.list" 에러 문제 해결 (0) | 2023.03.14 |
|---|